Manipulateur Morse
Manipulateur Morse
N° d’inventaire : 160
Fonction : envoyer par une succession de courants plus ou moins prolongés, des messages télégraphiques suivant le code de signaux Morse.
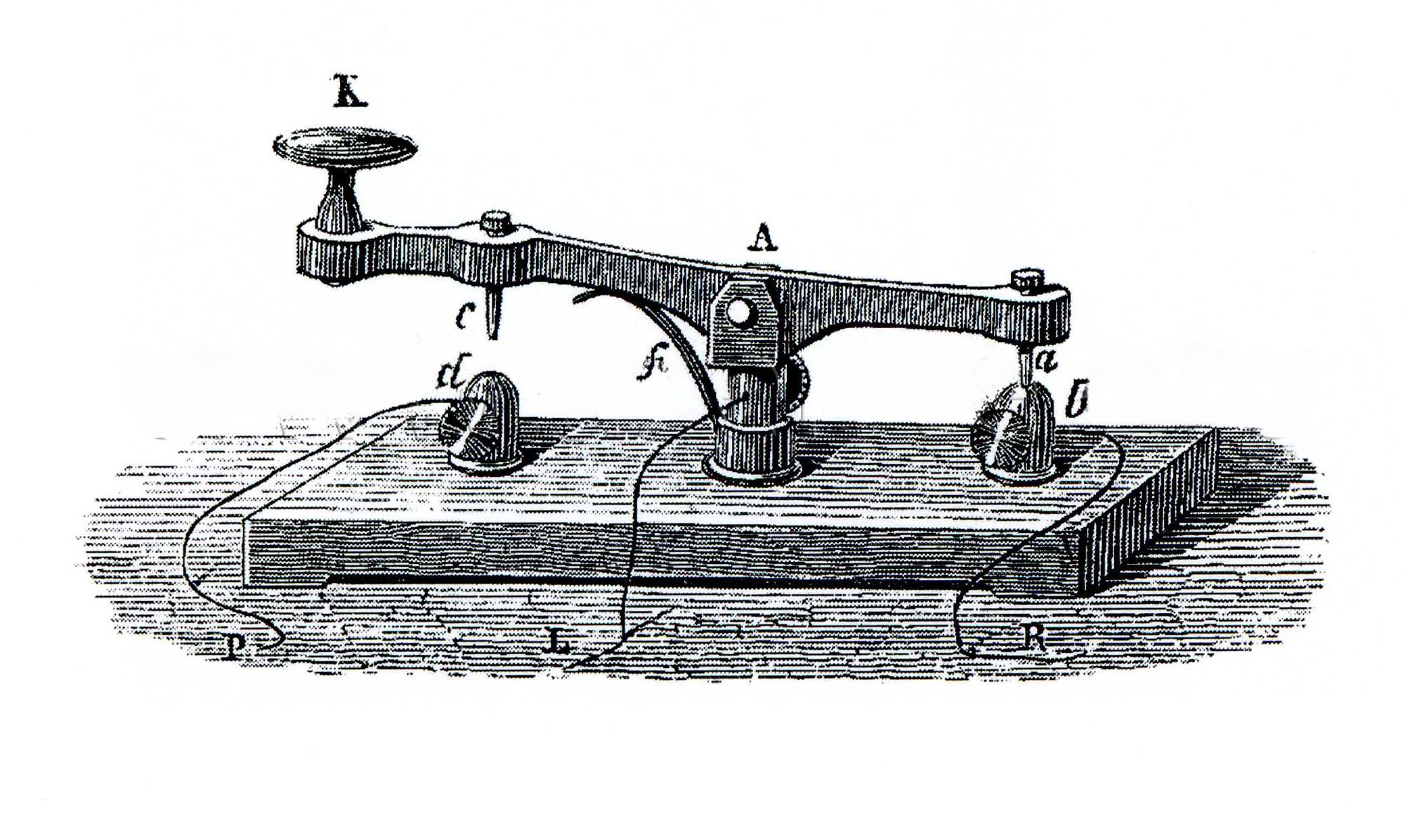
Description : il s’agit d’un levier en laiton mobile autour d’un axe (A) et muni de deux vis pointues (a) et (c) de part et d’autre de l’axe. Il est susceptible d’osciller entre un butoir (b) dit de repos et un second butoir (d) dit de travail. En temps ordinaire, un ressort (f) appuie l’extrémité de (a) sur le butoir (b). Lorsque la main de l’opérateur appuie sur la poignée (K) en bois ou en résine, l’extrémité de (c) est abaissée jusqu’à toucher le butoir (d).
Le butoir (d) est relié au pôle (+) d’une pile, le levier à la ligne télégraphique , le butoir (b) au relais du récepteur . Les branchements se font via trois bornes.
(Texte et schéma ASEISTE)
Mode opératoire : dès que l’opérateur appuie sur la poignée, le circuit série pile-levier-fil de ligne-récepteur de l’autre poste est fermé ; le courant délivré par la pile circule donc jusqu’au récepteur de l’autre poste. Suivant la durée du contact entre (c) et (d), des traits plus ou moins longs sont tracés sur le rouleau du papier du récepteur.